Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппаратаСтраница 11
Применение бесплатформенных систем имеет большие перспективы, поскольку они не обладают недостатками платформ, установленных в кардановых подвесах [9, 12, 15].
2.2 Гироскопический измеритель вектора угловой скорости
Гироскопические системы ориентации позволяют получить необходимую информацию для автоматического управления ЛА автономными методами, без каких-либо иных, не зависящих от внешних помех источников информации (локация, радионавигация, астроориентация и др.) [1, 21].
Бесплатформенные (бескарданные) системы ориентации, чувствительными элементами которых являются гироскопические датчики первичной информации, измеряющие углы или угловые скорости поворота ЛА и линейные ускорения (акселерометры и физические маятники). Эти датчики устанавливаются непосредственно на борту ЛА и работают совместно с цифровой или аналоговой вычислительной машиной, непрерывно производя расчет углов курса, крена и тангажа или иных параметров, определяющих ориентацию ЛА относительно базовой системы координат [1, 3, 9, 12].
В бесплатформенных системах ориентации и навигации гироскопы и акселерометры устанавливаются непосредственно на корпусе ЛА либо монтируются в специальные блоки чувствительных элементов. Сигналы этих датчиков поступают на вход ЭВМ, которая решает задачу ориентации аналитически, как бы, заменяя собой карданов подвес и координатный преобразователь гироплатформы.
Наибольшее распространение в бесплатформенных системах ориентации и навигации получают прецизионные датчики угловых скоростей (ДУС) и гироскопы на электростатическом подвесе, определяющие углы поворота ЛА вокруг центра его масс; также используются угловые и линейные акселерометры, установленные определенным образом на корпусе ЛА [1, 9, 21]. В отличие от систем ориентации с гироплатформами в бесплатформенных системах гироскопические датчики и акселерометры работают в более тяжелых условиях эксплуатации вследствие изменения расположения приборов по отношению к направлению гравитационного поля Земли, больших скоростей и ускорений, возникающих при вращении, колебаниях и вибрации корпуса ЛА [1].
Точность же измерения угловых скоростей, ускорений или угловых перемещений КА должна быть того же уровня, который достигнут в системах платформенного типа.
Датчики угловых скоростей – это один из основных и наиболее совершенных чувствительных элементов систем управления, стабилизации и навигации [21].
К характеристикам ДУС предъявляются очень жесткие требования. Так, верхний диапазон скоростей, измеряемых современными ДУС, соответствует десяткам и сотням градусам в секунду. Верхний диапазон входных воздействий, в котором ДУС обязан обеспечивать измерения угловой скорости, достигает 100 Гц [21].
Прецизионные ДУС бесплатформенных инерциальных систем должны иметь разрешающую способность до тысячных долей градусов в час и линейность до 10-3%, причем эти ДУС должны формировать выходной сигнал в цифровом виде. В широком диапазоне варьируются требования к массовым и габаритным параметрам приборов; из-за миниатюризации ДУС в последнее время значительно уменьшились величины собственного кинетического момента их гироскопов [1, 9, 12, 21].
Датчик угловой скорости (ДУС) служит для измерения угловой скорости КА от 0,001 до 10 с-1 в инерциальном пространстве. Для этой цели можно применять как двухстепенные, так и трехстепенные гироскопы. Гиротахометр (рис. 2.2) представляет собой обычно гироскоп с двумя степенями свободы и жесткой отрицательной обратной связью, которая создает противодействующий момент, пропорциональный угловому отклонению рамки от исходного положения для получения приемлемых переходных процессов применяются специальные демпферы; если гироскоп помещается в поплавок, то демпфирование осуществляется жидкостью [1, 21].
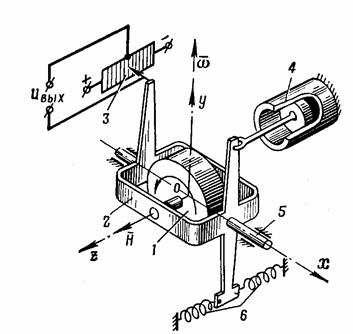
Рис. 2.2 - Кинематическая схема гиротахометра:
1 – ротор; 2 – рамка; 3 – датчик сигнала; 4 – демпфер; 5 – цапфа выходной оси; 6 – пружины; Н – кинетический момент гироскопа.