Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппаратаСтраница 18
Космический аппарат, движущийся по околоземной орбите [6], тоже мал по сравнению с расстоянием до центра притяжения планеты, однако он не подвержен (если не считать времени включения двигателей) действию больших внешних моментов, и поэтому пренебрежение малыми в обычной технике моментами (гравитационными, связанными со световым давлением и т. п.) уже не будет законным без соответствующей оценки этих моментов [1, 3].
Прежде, чем получить формулы для вычисления гравитационных моментов и обсудить некоторые следствия, вызванные существованием этих внешних моментов, поясним физическую сущность рассматриваемого явления па простейшем примере. Пусть в центральном ньютоновом поле сил находится тело, могущее быть представленным в виде двух одинаковых точечных масс, соединенных невесомым стержнем (идеализированная гантель), и пусть этот стержень будет наклонен на некоторый угол (отличный от 0 и pi/2) к линии, соединяющей его середину А с центром притяжения С (рис. 3.4).

Рис. 3.4 – Тело в виде двух одинаковых точечных масс, соединенных невесомым стержнем (идеализированная гантель) в ньютоновом поле
Если принять обычные допущения о параллельности и равенстве сил тяжести) действующих на обе массы гантели (считаем, что на них действует ускорение силы тяжести, соответствующее точке А), то связанные с ними силы G не дали бы момента относительно точки А, являющейся центром масс рассматриваемого тела. На самом деле силы тяжести будут действовать по прямым В1С и В2С, а величина силы тяжести в точке И1 будет меньше, чем в точке И2, поскольку В1С > В2С. Поэтому к “обычным” силам G, вычисленным по вектору ускорения силы тяжести, соответствующему точке А, следует ввести поправки, например малые силы P1i и P2, изменяющие должным образом величины сил тяжести, действующий на материальные точки, и силы P1 и Р2, изменяющие должным образом направления этих сил тяжести. Из рисунка видно, что пара сил R1 и R2 и пара сил P1 и Р2 (их можно считать 'парами, постольку малые силы Р1 и Р2, а также R1 и R2 будут отличаться друг от друга на .величины высшего порядка малости) создают моменты одного знака, стремящиеся совместить ось тела B1B2 с исправлением АС.
Таким образом, как зависимость величины ускорения силы тяжести от расстояния до центра притяжения, так и центральность поля тяготения приводят к эффектам одного типа - к появлению моментов, стремящихся повернуть ось тела, связанную с геометрией распределения масс в нем, в некоторое определенное положение относительно прямой, соединяющей центр масс тела с центром притяжения.
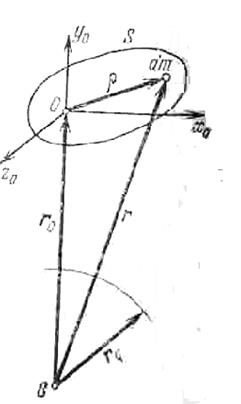
Рис. 3.5.
Найдем выражения, позволяющие вычислять составляющие вектора гравитационного момента Мгр, действующего на некоторое тело S [1, 3]. Введем связанную с телом правую систему координат ОXоYоZo с ортами i, j, k и началом в центре масс тела О, которая совпадает с орбитальной. Соответственно ось OYo натравим по продолжению радиуса-вектора, соединяющего центр притяжения С с началом О, а ось ОXo расположим в мгновенной орбитальной плоскости. Гравитационный момент, действующий на тело S, будет равен:
 ;
;
где p - радиус-вектор некоторой элементарной массы материального тела,
dG-вектор силы тяжести, действующей на эту элементарную массу. Очевидно, что
 .
.
Здесь g - ускорение силы тяжести на поверхности планеты, r – радиус-вектор элементарной массы dm относительно центра тяготения С, гg -удаление поверхности планеты от центра C. Введя еще r0 - радиус-вектор центра масс тела S относительно С, следовательно [3]:
 ;
;
где ![]() - гравитационная постоянная для рассматриваемой планеты, равная
- гравитационная постоянная для рассматриваемой планеты, равная ![]() .
.