Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппаратаСтраница 28
![]()
4.4 Алгоритм стабилизации
В правых частях динамических уравнений (1.1) стоят проекции вектора главного момента всех внешних сил М, действующих на корпус космического аппарата : ![]() .
.
Характерной особенностью момента управления ![]() является активность, он появляется в результате включения вспомогательных органов (в частности реактивных двигателей стабилизации), и исчезает при их отключении. Момент
является активность, он появляется в результате включения вспомогательных органов (в частности реактивных двигателей стабилизации), и исчезает при их отключении. Момент ![]() , следует логике теории автоматического управления, и обеспечивает заданное угловое движение корпуса космического аппарата [1, 3].
, следует логике теории автоматического управления, и обеспечивает заданное угловое движение корпуса космического аппарата [1, 3].
Источником внешнего возмущающего момента ![]() , является взаимодействие с внешней [1, 4, 6, 10, 12] средой, приводящее к появлению действующих на корпус внешних сил – гравитационного, аэродинамического, светового, магнитного и др. Будем рассматривать гравитационный и аэродинамический моменты. Другие моменты не будем рассматривать в силу их малости.
, является взаимодействие с внешней [1, 4, 6, 10, 12] средой, приводящее к появлению действующих на корпус внешних сил – гравитационного, аэродинамического, светового, магнитного и др. Будем рассматривать гравитационный и аэродинамический моменты. Другие моменты не будем рассматривать в силу их малости.
Момент ![]() имеет две составляющих –
имеет две составляющих – ![]() (создаваемую реактивными двигателями), и
(создаваемую реактивными двигателями), и ![]() (создаваемым моментным магнитоприводом и др. Будем рассматривать только
(создаваемым моментным магнитоприводом и др. Будем рассматривать только ![]() ).
).
Важным свойством динамической системы ориентации является: если осями ориентации являются поступательно движущиеся оси, то при соответствующем законе управления вместо сложных пространственных поворотов космического аппарата можно изучать три независимых плоских угловых движения, что мы и сделаем в системе, т.е.:
 (4.27)
(4.27)
получено три независимых уравнения.
Пусть двигатели работают в импульсном режиме [1, 4, 6, 11, 12]. Зона нечувствительности определяется условием:
![]() . (4.28)
. (4.28)
Для изучения нужного динамического процесса, коэффициенты k в законе управления (Рис. 4.2):
![]() ; (4.29)
; (4.29)
должны быть положительны. Сигнал управления формируется путем сложения сигналов датчика угла и датчика угловых скоростей. Включение двигателей происходит при ![]() . Диаграмма зависимости управляющего момента
. Диаграмма зависимости управляющего момента ![]() от сигнала
от сигнала ![]() имеет вид ( рис 4.3 ) [1 ,3 , 25].
имеет вид ( рис 4.3 ) [1 ,3 , 25].
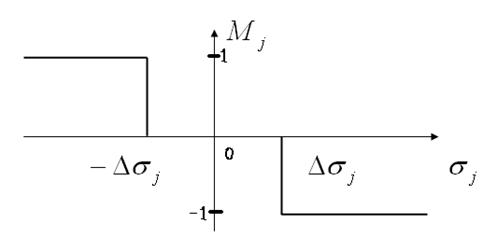
Рис. 4.2 - Закон управления
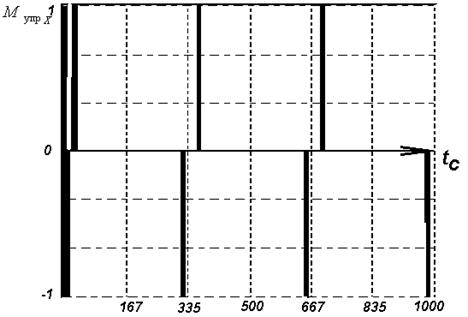
Рис. 4.3 - Изменение управляющего момента со временем в канале X:
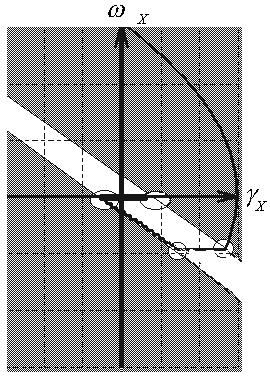
Фазовая диаграмма процесса установления ориентации имеет вид (рис 4.2). Заштрихованная область – это комбинация значений ![]() , при которых действует управляющий момент [6]. Линии
, при которых действует управляющий момент [6]. Линии ![]() являются линиями переключения, т.е. при пересечении этих линий изображающей точкой происходит включение (или выключение) исполнительных органов системы ориентации. Указанные линии походят через точки
являются линиями переключения, т.е. при пересечении этих линий изображающей точкой происходит включение (или выключение) исполнительных органов системы ориентации. Указанные линии походят через точки ![]() на оси абсцисс, а их наклон зависит от коэффициента k [1, 3, 25]:
на оси абсцисс, а их наклон зависит от коэффициента k [1, 3, 25]:
 ; (4.30)
; (4.30)