Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппаратаСтраница 33
где N – это исходные начальные условия, N- параметр варьируемый в сторону уменьшения, N+ параметр варьируемый в сторону увеличения [25].
Упрощенная выборка имеет вид:
Таблица 4.3
|
N |
N- |
N+ | ||
|
Нормальный режим |
264 |
157 |
999 | |
|
Отказ работы двигателя типа «не отключение» |
1 |
1000 |
1000 |
999 |
|
3 |
1000 |
1000 |
1000 | |
|
6 |
1000 |
1000 |
999 | |
|
8 |
999 |
1000 |
1000 | |
|
Отказ работы двигателя типа «не включение» |
1 |
1000 |
157 |
1000 |
|
3 |
999 |
286 |
1000 | |
|
6 |
265 |
158 |
999 | |
|
8 |
264 |
157 |
1000 | |
Для наглядности построим гистограмму, и изобразим ее в виде функции – закона распределения, [8, 9, 25-29] для облегчения нахождения критической точки в методе статистических гипотез. Находим математические ожидания. Графики зависимостей приведены на (Рис. 4.9) [27-29]:
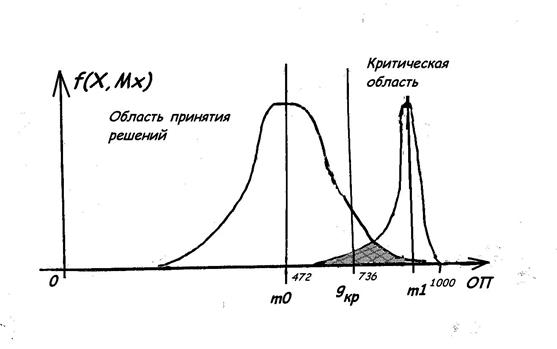
Рис. 4.9 – Аппроксимированная гистограмма
Здесь m0 и m1 - математические ожидания. При рассмотрении левостороннего критерия, получили критическую точку Gкр = 736. Т.о. ![]() =Gкр, если, следуя алгоритму контроля, ОП <
=Gкр, если, следуя алгоритму контроля, ОП < ![]() , то есть основания утверждать, что отказа в работе двигателя нет, в противном случае, при попадании значения ОП в критическую область, т.е. ОП >=
, то есть основания утверждать, что отказа в работе двигателя нет, в противном случае, при попадании значения ОП в критическую область, т.е. ОП >= ![]() , ПО присваивается значение единицы, и есть основания утверждать, что отказ в работе двигателя есть [25].
, ПО присваивается значение единицы, и есть основания утверждать, что отказ в работе двигателя есть [25].
5 РЕЗУЛЬТАТЫ ЧИСЛЕННОГО МОДЕЛИРОВАНИЯ
Рассмотрим космический аппарат как упругое тело, описываемое уравнениями (3.1), (3.2), (3.4), (3 5). Рассмотрим режим построения базовой ориентации с учетом внешних возмущающих воздействий – аэродинамического и гравитационного, а также с учетом дрейфа нуля ГИВУС.
Для наглядности функционирования алгоритма стабилизации ДС КА, где в качестве гистерезиса используется пауза по времени, проведем моделирование СУО, с начальными условиями, приведенными в табл. 5.1.
Таблица 5.1
|
Вариант № |
Угловые скорости |
Угловые ускорения |
Моменты инерции |
|
1 |
Wx = 0.5 c-1 Wy = 0 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
|
2 |
Wx = 1 c-1 Wy = 0 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
|
3 |
Wx = 3 c-1 Wy = 1 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
|
4 |
Wx = -4 c-1 Wy = 0 c-1 Wz = 0 c-1 |
Gx = -1 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
|
5 |
Wx = 0 c-1 Wy = 3 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
|
6 |
Wx = 0.5 c-1 Wy = 0.5 c-1 Wz = 1 c-1 |
Gx = 0.001 c-2 Gy = 0.001 c-2 Gz = 0.001 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |