Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппаратаСтраница 4
ВВЕДЕНИЕ
Системы управления, относятся к разряду сложных систем с большим количеством элементов, которые подвержены отказам. Одним из основных требований, предъявляемых к системе управления, является ее высокая надежность.
Отказ реактивных двигателей стабилизации системы управления ориентацией космического аппарата, может приводить к не выполнению целевой задачи, а отказ типа «неотключение» двигателя, кроме того, может приводить к большим потерям рабочего тела и раскрутке космического аппарата до недопустимых угловых скоростей.
Отказы чувствительных элементов гироскопического измерителя вектора угловой скорости, могут приводить к не выполнению задачи системы управления ориентацией космического аппарата.
Существующие методы контроля работоспособности ДС являются достаточно грубыми, чтобы выявлять отказ типа "неотключение" при наличии остаточной неполной тяги двигателя на фоне действия внешних возмущающих моментов (гравитационных, аэродинамических и др.). Поэтому разработка алгоритмов идентификации отказов двигателей стабилизации, особенно отказов с неполной тягой при наличии шумов измерений и действии внешних возмущающих воздействий, является актуальной задачей.
Таким образом, разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата – является актуальной задачей.
В настоящей работе решается задача построения алгоритмов контроля и идентификации отказов командных приборов и исполнительных органов.
1 ПОСТАНОВКА ЗАДАЧИ
Возьмем для рассмотрения космический аппарат, как абсолютно твердое тело, не содержащих каких-либо движущих масс [1] (см. рис. 1.1).
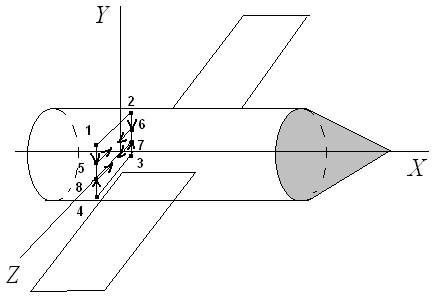
Рис. 1.1 - Модель КА
Если триэдр жестко связанных с телом осей Oxyz, с началом координат в центре масс КА (связанная система координат - ССК) направить так, чтобы они совпали с главными центральными осями инерции, то центробежные моменты инерции обратятся в нуль и система уравнений Эйлера [1, 2], описывающая динамику вращения КА вокруг центра масс, примет вид (1.1):
 (1.1)
(1.1)
Наряду с динамическими уравнениями рассматриваются кинематические уравнения, связывающие угловые скорости wj с углами поворота триэдра осей Oxyz относительно триэдра осей некоторой базовой системы координат (БСК), начало которой совпадает с началом координат ССК, а оси определенным образом ориентированы в инерциальном пространстве и движутся поступательно [1, 3, 4] . Пусть углы ориентации (углы Эйлера-Крылова) ![]() – полностью определяют угловое положение ССК относительно БСК [1, 4]. Понятие углов ориентации [2] становится однозначным лишь после того, как введена последовательность поворотов [3, 4, 5, 6] твердого тела вокруг осей Ox, Oy, Oz. Для последовательности поворотов:
– полностью определяют угловое положение ССК относительно БСК [1, 4]. Понятие углов ориентации [2] становится однозначным лишь после того, как введена последовательность поворотов [3, 4, 5, 6] твердого тела вокруг осей Ox, Oy, Oz. Для последовательности поворотов: ![]() система кинематических уравнений имеет вид (1.2):
система кинематических уравнений имеет вид (1.2):
(1.2)
Системы (1.1) и (1.2) описывают угловое движение твердого тела относительно БСК. Будем предполагать, что углы Эйлера-Крылова jj малы [5]. Текущие значения wj оцениваются в системе по информации измерителя угловой скорости, измеряющего интегралы от проекций вектора абсолютной угловой скорости КА на оси чувствительности прибора. В качестве модели измерителя используется модель ГИВУС [6]. Алгоритм обработки данных в бесплатформенной инерциальной навигационной системе строится с использованием субоптимального дискретного фильтра Калмана [7].
Теперь усложним задачу, рассматривая космический аппарат как упругое тело, что максимально приближает имитационную модель к реальной [1, 8].
Рассмотрим уравнения осцилляторов для упругой модели (1.3):